介绍
点击 Foxglove 仪表板 中的“可视化”将带您��进入“打开数据源”对话框。
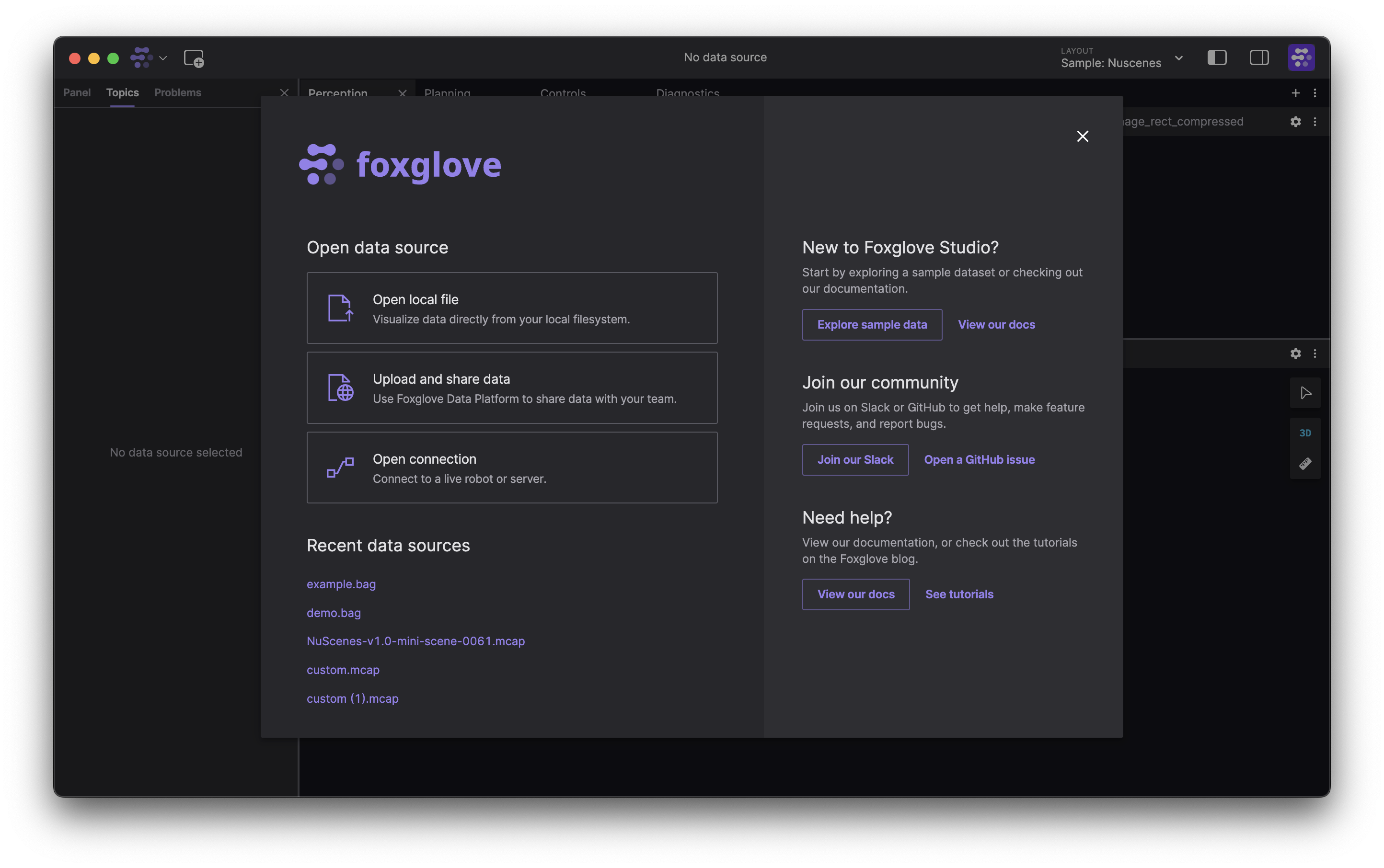
数据源
连接到实时数据源或加载本地和Foxglove导入文件以可视化它们的数据。
| 用例 | 支持的格式 | |
|---|---|---|
| 实时数据 “打开连接” | 检查来自实时机器人堆栈或远程源(例如 S3 存储桶)的实时数据 | |
| 本地数据 “打开本地文件” | 检查存储在您计算机上的数据 | |
| 导入数据 “上传和共享数据” | 检查导入到 Foxglove 平台的数据 |
如果您对 Foxglove 感兴趣,但手头没有自己的机器人数据,您可以“探索示例数据”以加载来自 nuScenes 的示例数据到示例布局中。
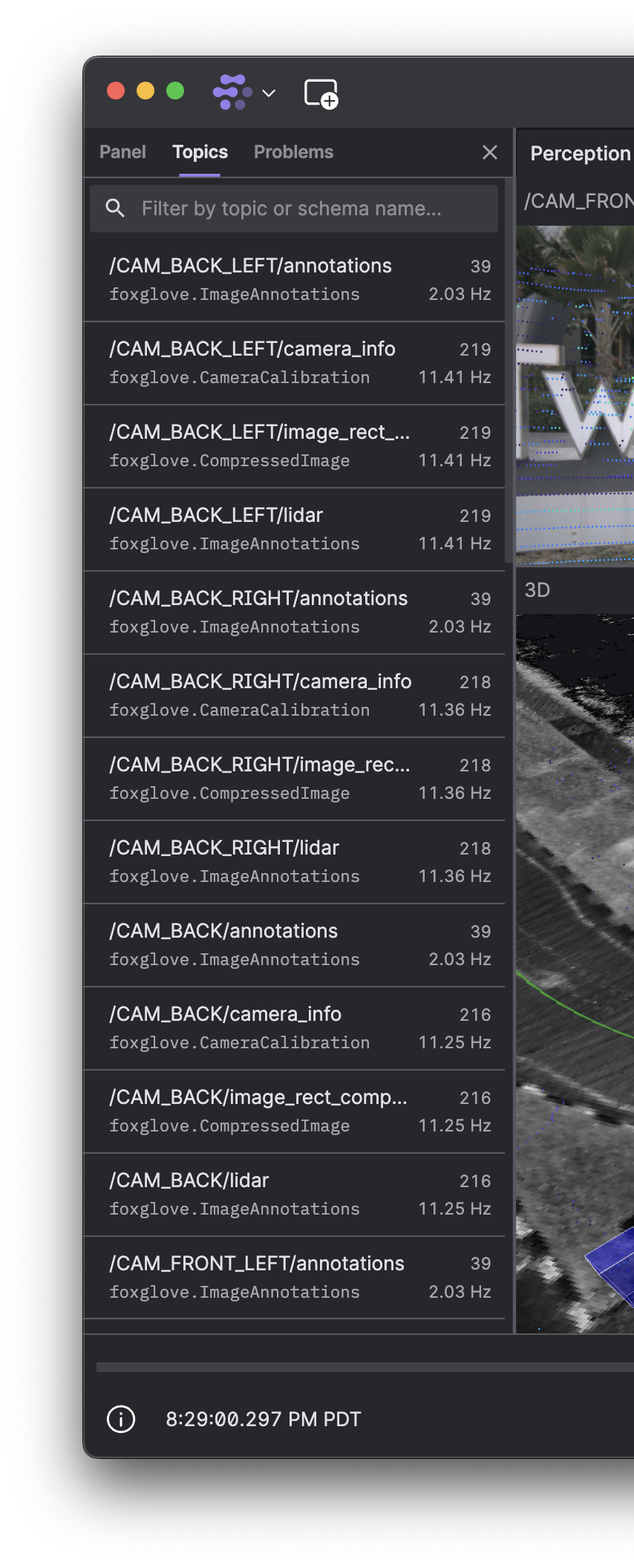
连接后,Foxglove 将在侧边栏中显示数据源的主题: