导入数据
将 ROS 1 (.bag) 和 MCAP (.mcap) 数据文件导入 Foxglove 平台,以便后续可视化和分析。
查看 MCAP 文档 以获取更多关于转换其他数据格式(如 ROS 2、Protobuf、JSON 等)为 MCAP 文件格式的信息。
(可选)添加设备
要按记录的机器人组织文件,请为每个要跟踪的真实或模拟机器人创建唯一命名的设备。文件不必与设备关联即可导入。
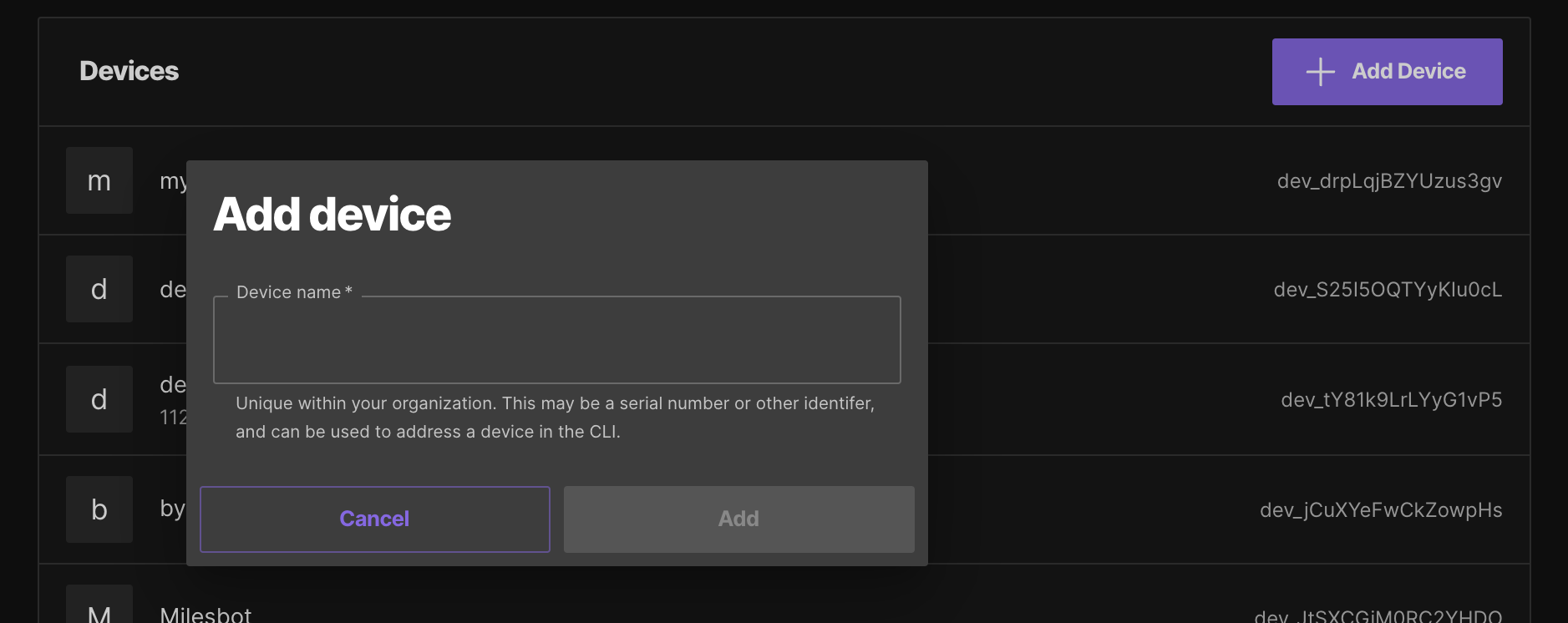
点击设备页面上的“添加设备”来创建您的设备:
导入文件
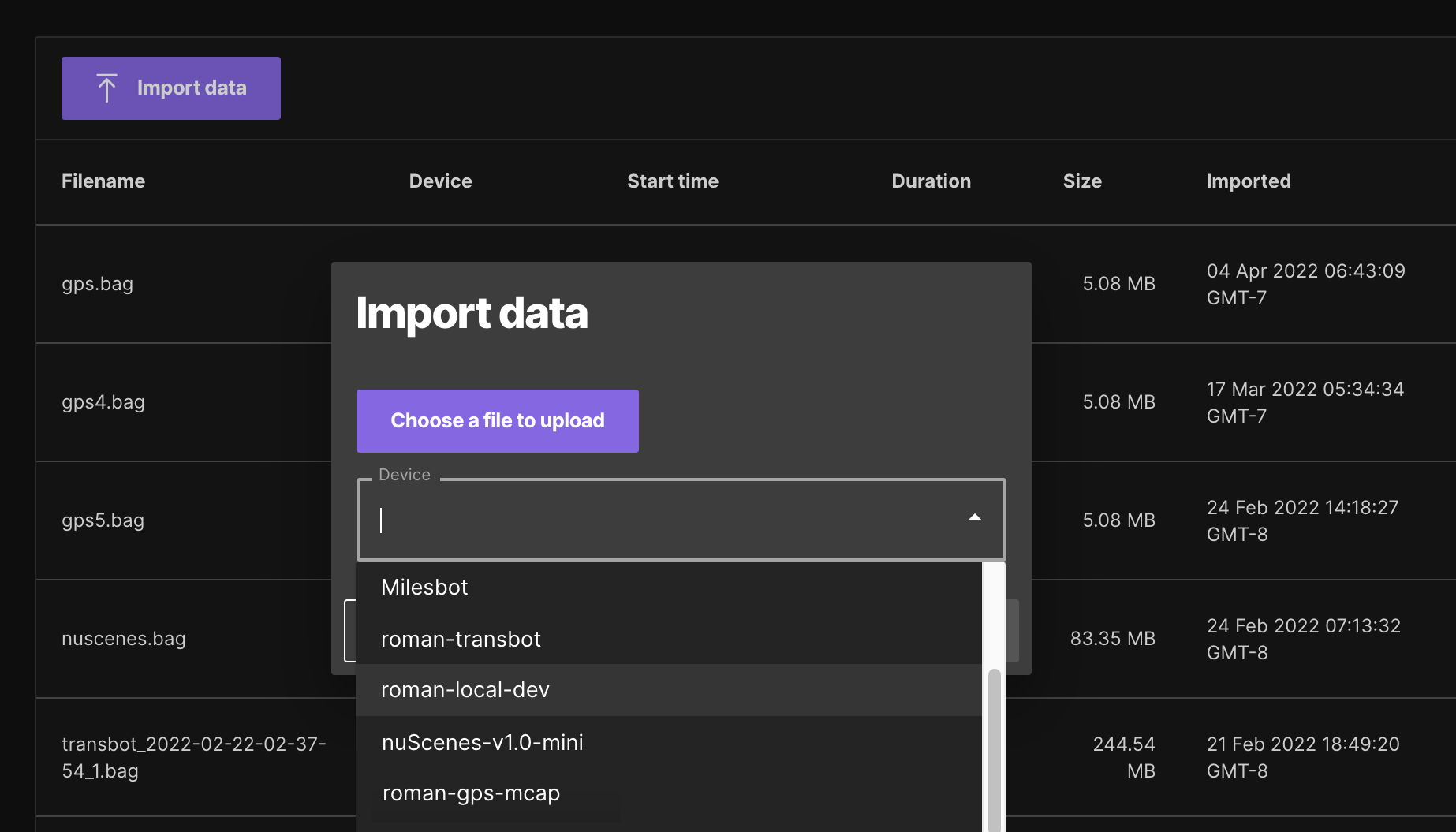
或者,您可以点击设备页面上创建的设备之一,进入其详细信息页面——从那里,您可以直接将数据导入该设备。
选择您要导入的文件,以及如果需要,您要与记录关联的设备:
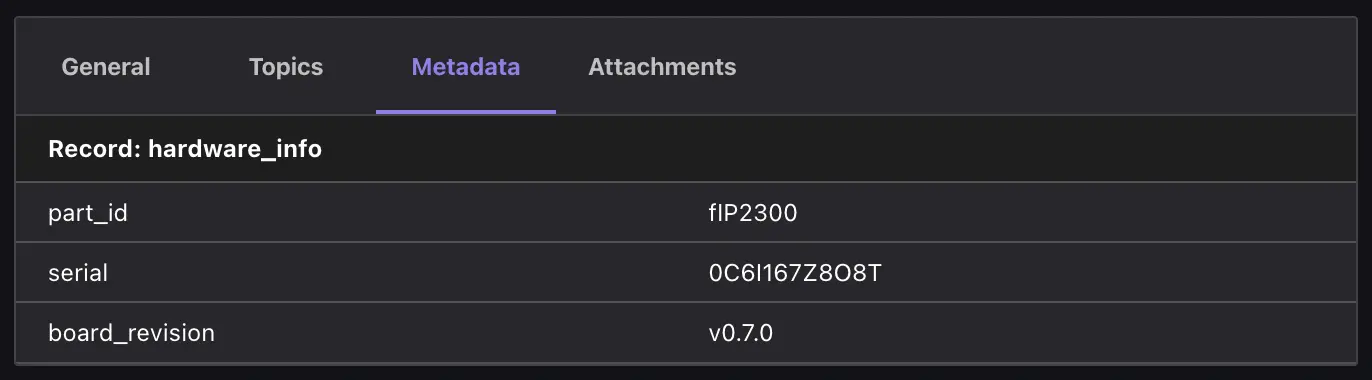
当导入带有元数据记录或附件的 MCAP 文件时,Foxglove 将在记录的详细信息页面的_元数据_和_附件_选项卡下索引并显示它们:
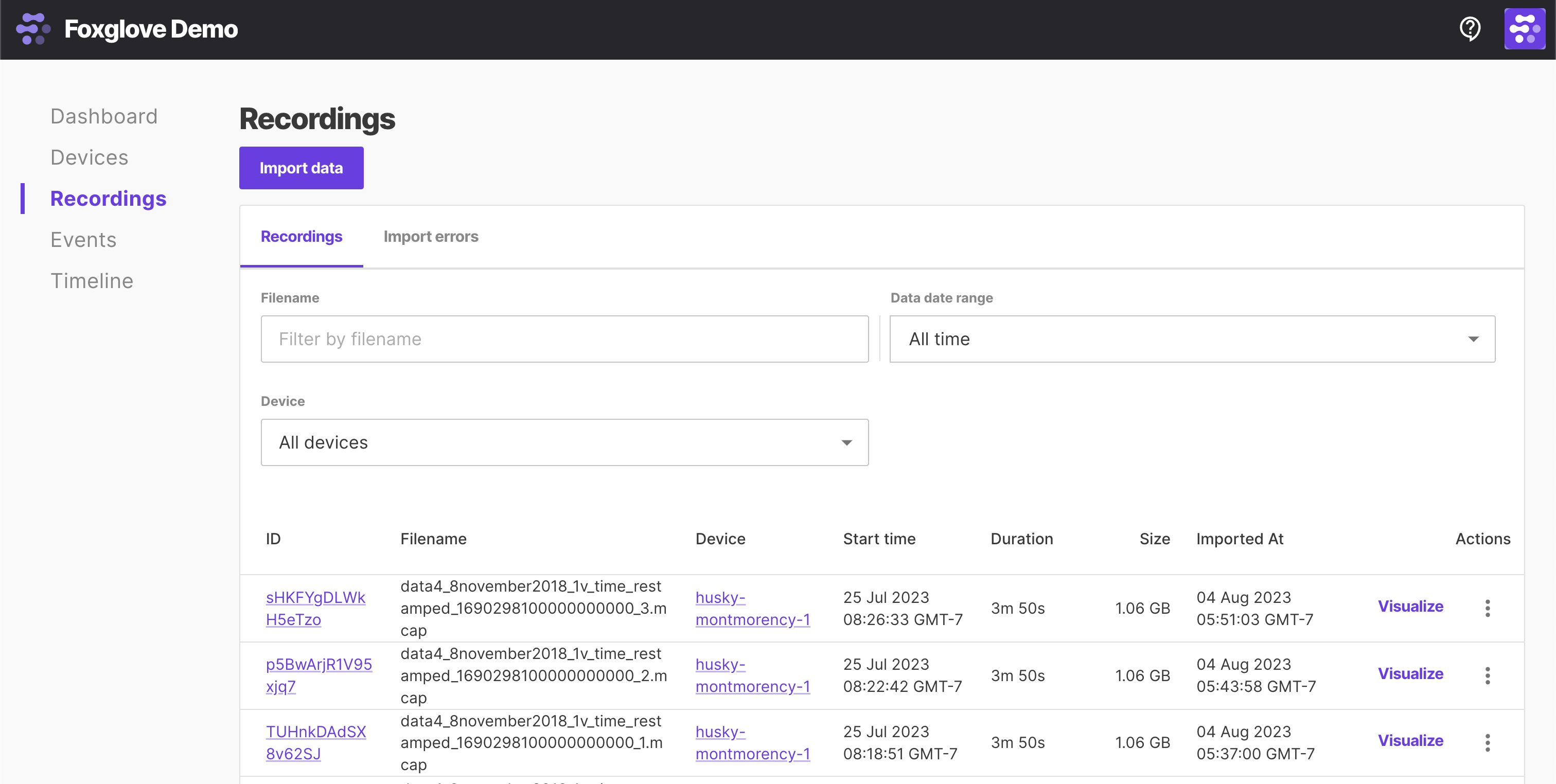
查看记录
在记录页面上以列表形式查看导入的数据,或在时间线页面上以时间范围形式查看。